
組み込みシステムエンジニアリングの世界において ロジックとユーザー間のインターフェースは全てを決定します。グラフィカルインターフェースが単純なキャラクタLCDから高解像度TFTへ移行する中で、通信プロトコルの選択はプロジェクト成功の要となります。様々な選択肢の中で、, SPIディスプレイ, は「ちょうど良い」解決策として台頭しています——速度、複雑さ、コストのバランスが取れているからです。 工業用HMIに取り組むプロフェッショナル開発者であれ、.
レトロゲーミングハンドヘルドを完成させようとするホビイストであれ、 この包括的ガイドでは、SPIディスプレイのあらゆる技術的側面を探求します。 1. SPIディスプレイの技術的アーキテクチャ SPIディスプレイの価値を理解するには、まず「シリアル・ペリフェラル・インターフェース」プロトコルそのものを理解しなければなりません。SPIは同期式、全二重、4線式のシリアルデータリンクです。ディスプレイの文脈では、マイクロコントローラ(マスター)がタイミングを決定し、ディスプレイコントローラ(スレーブ)がピクセルデータを受け取ります。, SPIディスプレイの論理ピン は「ちょうど良い」解決策として台頭しています——速度、複雑さ、コストのバランスが取れているからです。.

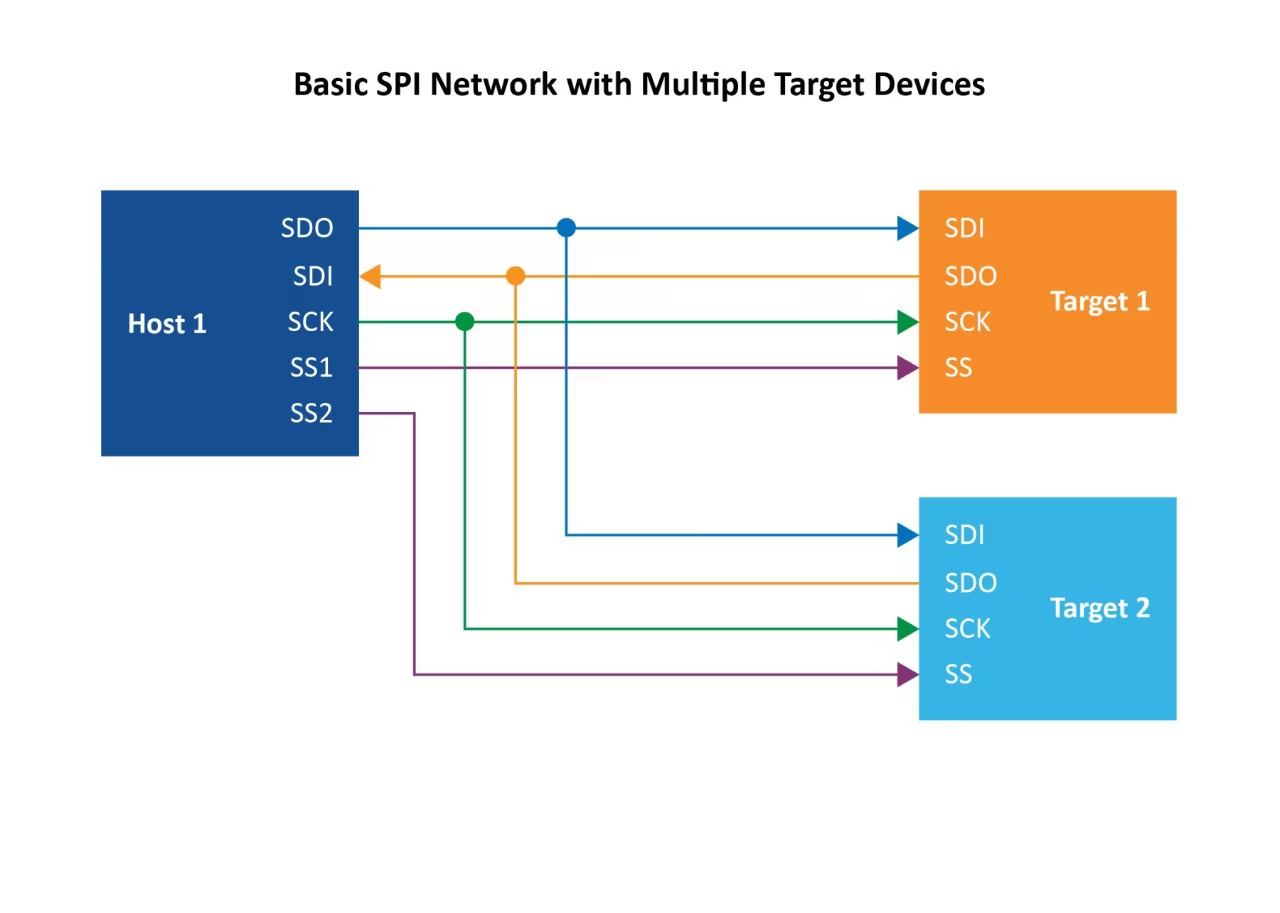
標準的なSPIディスプレイインターフェースは、通常以下で構成されます:
SCK(シリアルクロック): は「ちょうど良い」解決策として台頭しています——速度、複雑さ、コストのバランスが取れているからです。, MCUによって生成されます。データ転送速度を決定します。高速SPIディスプレイの場合、ESP32-S3のようなプラットフォームでは最大80MHzに達します。.
MOSI(マスター出力・スレーブ入力):
実際の画像データを伝送するラインです。 は「ちょうど良い」解決策として台頭しています——速度、複雑さ、コストのバランスが取れているからです。 MISO(マスター入力・スレーブ出力):
- データを読み戻すために使用されます(例:ドライバチップの識別やタッチ座標の読み取り)。 CS(チップセレクト): は「ちょうど良い」解決策として台頭しています——速度、複雑さ、コストのバランスが取れているからです。, 「有効化」スイッチです。複数のSPIディスプレイやセンサーが同じバスを共有することを可能にします。 DC/RS(データ/コマンド):.
- 受信バイトが設定コマンドか生のピクセルデータかを切り替える、ディスプレイにとって極めて重要なピンです。 RST(リセット):.
- ディスプレイコントローラのハードウェアリセット用です。 SPIモードと極性.
- 全てのSPIディスプレイが同じように作られているわけではありません。クロック極性(CPOL)と位相(CPHA)に応じて、異なる「モード」(モード0からモード3)で動作します。ILI9341のようなほとんどの最新ドライバは、データがクロックの立ち上がりエッジでサンプリングされるモード0をデフォルトとしています。 2. SPIディスプレイを使用する比類なき利点 は「ちょうど良い」解決策として台頭しています——速度、複雑さ、コストのバランスが取れているからです。 利点1:爆発的なデータスループット.
- SPIディスプレイの最大の「利点」は速度です。I2C通信プロトコルが約400kbpsに制限されているのに対し、ハードウェアSPIバスは容易に20Mbpsから40Mbpsを維持できます。 標準的な320×240 TFTの計算を見てみましょう:.
- 総ピクセル数: 320 × 240 = 76,800 ピクセルあたりのビット数(RGB565): 16 ビット.
フレームあたりの総ビット数: 1,228,800
400kHzのI2Cバスでは、1フレームを描画するのに3.07秒かかります。20MHzのSPIバスでは、わずか0.06秒で済み、滑らかな16 FPSを実現します。DMA(ダイレクトメモリアクセス)を使用すれば、これはさらに向上します。 は「ちょうど良い」解決策として台頭しています——速度、複雑さ、コストのバランスが取れているからです。 利点2:ユニバーサルなマイクロコントローラ互換性 ILI9341 低消費電力のMSP430から高性能なSTM32シリーズまで、ほぼ全てのMCUは専用のハードウェアSPIペリフェラルを備えています。これは、SPIディスプレイが異なるハードウェアエコシステム間で非常に高い移植性を持つことを意味します。.
利点3:簡素化されたPCB配線
パラレルディスプレイインターフェースと比較して
The single biggest “Pro” for は「ちょうど良い」解決策として台頭しています——速度、複雑さ、コストのバランスが取れているからです。 is speed. While the I2C communication protocol is limited to roughly 400kbps, a hardware SPI bus can easily sustain 20Mbps to 40Mbps.
Let’s look at the math for a standard 320×240 TFT:
Total Pixels: $320 \times 240 = 76,800$
Bits per Pixel (RGB565): $16$ bits
Total bits per frame: $1,228,800$
On a 400kHz I2C bus, it would take 3.07 seconds to draw one frame. On a 20MHz SPI bus, it takes only 0.06 seconds, enabling a smooth 16 FPS. With DMA (Direct Memory Access), this jumps even higher.
Pro #2: Universal Microcontroller Compatibility
From the low-power MSP430 to the high-performance STM32 series, almost every MCU has a dedicated hardware SPI peripheral. This means は「ちょうど良い」解決策として台頭しています——速度、複雑さ、コストのバランスが取れているからです。 are incredibly portable across different hardware ecosystems.
Pro #3: Simplified PCB Routing
Compared to parallel display interfaces (8本、16本、または24本のデータラインを必要とするものとは異なり)、, は「ちょうど良い」解決策として台頭しています——速度、複雑さ、コストのバランスが取れているからです。 わずか4〜6本のラインのみを必要とします。これにより、 多層PCB設計の複雑さが大幅に軽減され、 トレース長の不一致や信号スキュー(位相ずれ)のリスクが最小限に抑えられます。.
3. 重大な欠点:SPIの限界
欠点1:ピン数のペナルティ
パラレル方式よりは単純ですが、, は「ちょうど良い」解決策として台頭しています——速度、複雑さ、コストのバランスが取れているからです。 I2Cと比較して「ピンを貪る」方式です。典型的な構成(CS、DC、RST、SCK、MOSI、BL)では6本のGPIOピンを消費します。 ATtinyのような 小型フォームファクタのMCUでは、これは利用可能なI/Oの75%を占める可能性があります。.
欠点2:距離と信号完全性
SPIは(USBやイーサネットとは異なり)差動信号ではありません。クロック速度が上がるにつれ、信号は 電磁干渉(EMI). に対して非常に敏感になります。 は「ちょうど良い」解決策として台頭しています——速度、複雑さ、コストのバランスが取れているからです。 ディスプレイがMCUから15cm以上離れている場合、以下のような問題に遭遇する可能性が高くなります:
- 色反転: ビットの読み間違いによる「ゴースト」カラー。.
- 画面ティアリング: クロックパルスの欠落による部分的な更新。.
- 完全なロックアップ: ディスプレイコントローラがコマンドに応答しなくなる。.
欠点3:組み込みアドレス指定の欠如
で I2Cネットワーキングでは、, 各デバイスはソフトウェアアドレスを持ちます。SPIでは、各デバイスごとに物理的な チップセレクト(CS) ピンが必要です。複数のセンサーと2つのディスプレイを備えた 複雑なIoTゲートウェイ を構築する場合、 は「ちょうど良い」解決策として台頭しています——速度、複雑さ、コストのバランスが取れているからです。, ピン管理は運用上の悪夢となります。.
4. 競合製品詳細比較:ILI9341 vs. ST7789 vs. SSD1306
プロジェクトに適切なコントローラを選ぶことは、 は「ちょうど良い」解決策として台頭しています——速度、複雑さ、コストのバランスが取れているからです。 プロトコル自体と同じくらい重要です。業界の「ビッグスリー」の詳細は以下の通りです:
| ドライバーチップ | ディスプレイタイプ | 最大解像度 | 最適な使用例 |
| ILI9341 | TFT LCD | 320×240 | 最も一般的で、膨大なライブラリサポートあり。. |
| ST7789 | IPS LCD | 240×240 | 優れた色彩、高速SPI(50MHz以上)。. |
| SSD1306 | 有機EL | 128×64 | 低消費電力、高コントラスト、 ウェアラブル. |
単色ディスプレイに最適。
について ILI9341 ILI9341が「デフォルト」選択肢である理由 は「ちょうど良い」解決策として台頭しています——速度、複雑さ、コストのバランスが取れているからです。. このチップはTFTディスプレイの王者です。 世界で最も文書化されたチップであり、バグに遭遇した場合、99%の確率で. Arduinoフォーラム.
に解決策が存在します。幅広い画面方向をサポートし、組み込みのガンマ補正機能を備えています。
5. 高度な最適化:DMAとフレームバッファリングの活用 は「ちょうど良い」解決策として台頭しています——速度、複雑さ、コストのバランスが取れているからです。 ディスプレイをスマートフォンのように応答性の高いものにしたいのであれば、標準的な「ビットバンギング」ライブラリに頼ることはできません。 ダイレクトメモリアクセス(DMA).
を活用する必要があります。
SPIにおけるDMAとは? 通常、CPUはピクセルデータのすべてのバイトをSPIバッファに「手渡し」で運ぶ必要があり、これによりCPUの注意力の100%が消費されます。, DMA最適化を施すと、 “CPUはDMAコントローラに以下のように指示するだけです:”
「これが私の画像のメモリアドレスだ。私が他の作業をしている間に、これをSPIディスプレイに送信してくれ。」
ダブルバッファリングの実装 (ESP32-S3 with PSRAMのようなものを使用した) ハイエンドのマイクロコントローラプロジェクトでは、 DC/RS(データ/コマンド): ダブルバッファリング を実装できます。.
- バッファA: ディスプレイが現在読み取り表示しているもの。.
- バッファB: CPUはここで 革新的 フレームを描画しています。.
- スイッチ: 描画が完了すると、ポインタが交換されます。この技術により、低価格なハードウェアでよく見られる「垂直線」のちらつきが解消されます。 は「ちょうど良い」解決策として台頭しています——速度、複雑さ、コストのバランスが取れているからです。.
6. ハードウェアエンジニアリング: レベルシフトと電源管理
現場での故障で最も一般的な原因の一つは、 は「ちょうど良い」解決策として台頭しています——速度、複雑さ、コストのバランスが取れているからです。 不適切なハードウェア統合です。.
3.3V対5Vロジックの落とし穴
最も は「ちょうど良い」解決策として台頭しています——速度、複雑さ、コストのバランスが取れているからです。 (特にTFT)は3.3Vデバイスです。これらを5Vの Arduino Uno, に直接接続すると、ディスプレイの論理ゲートを焼損する可能性が高いです。.
解決策: SCKおよびMOSIラインには、必ず ロジックレベルシフタ (74LVC245など)または専用の電圧分圧器を使用してください。.
バックライトの電流消費
3.5インチ SPIディスプレイ のバックライトは、最大150mAを消費することがあります。これは多くの場合、MCUの LDOレギュレータ が過熱せずに処理できる容量を超えています。.
- プロのヒント: バックライトの駆動には MOSFET を使用してください。これにより、 PWM(パルス幅変調) を使用してソフトウェアで輝度を制御できるようになり、 バッテリー駆動デバイスの設計.
において必須となります。
7. SPIディスプレイのトラブルシューティング: 実地ガイド
- 画面が白いまま、または「ノイズ」を表示する場合は、次のチェックリストに従ってください: クロック速度を確認: は「ちょうど良い」解決策として台頭しています——速度、複雑さ、コストのバランスが取れているからです。 多くのディスプレイは40MHzをサポートすると謳っていますが、ブレッドボード上では20MHzを超えると動作しないことがあります。テスト時には
SPI_CLOCKを4MHzに下げてください。. - リセットピンを確認: 多くのドライバは、SPIコマンドを受け付ける前に、非常に特定のリセットシーケンス(10ms間Low→100ms間High)を必要とします。.
- 共有バスの競合: 同じバス上で SDカードモジュール を使用している場合は、ディスプレイを初期化する前に、SDカードのCSがHIGH(無効)になっていることを確認してください。.
- デカップリングコンデンサ: 高周波スイッチングノイズを除去するため、10uFと0.1uFのコンデンサをディスプレイのVCC/GNDにできるだけ近接して配置してください。.
8. SPIディスプレイの実世界での使用例
事例研究A: レトロ携帯ゲーム機
In projects like the GameBoy Nano, のようなプロジェクトでは、 は「ちょうど良い」解決策として台頭しています——速度、複雑さ、コストのバランスが取れているからです。 SPIディスプレイの使用が必須です。高いFPSにより60Hzでのスクロールが可能となり、少ないピン数によりDパッドやボタン用に十分なGPIOを残せます。.
事例研究B: 産業用センサーモニター
# SPIを有効化 産業用IoTダッシュボード, では、信頼性が鍵となります。. SPIディスプレイ は、モーターノイズの多い環境ではI2Cよりも堅牢な接続を提供します。特にシールドケーブルと組み合わせた場合に有効です。.
FAQ: SPIディスプレイに関するすべて
Q: SPIディスプレイを長距離で動作させることはできますか?
A: 容易ではありません。標準SPIは「PCB上」または「短いケーブル」通信を想定しています。1メートルを超える距離の場合は、 RS485 の使用や、専用ドライバチップを用いてSPI信号を差動ペアに変換することを検討すべきです。.
Q: SPIディスプレイがArduino UnoではESP32よりも非常に遅いのはなぜですか?
A: Arduino Unoは16MHzで動作する8ビットプロセッサで、最大SPIクロックは8MHzです。ESP32は240MHzで動作する32ビットプロセッサで、SPIクロックは80MHzです。生の処理能力が、 組み込みGUIライブラリ がピクセルデータを計算する速度に大きな違いをもたらします。.
Q: SPIディスプレイはタッチスクリーンをサポートしていますか?
A: はい。多くのモジュールには XPT2046タッチコントローラ が同一基板上に実装されています。これらのコントローラは通常、独自のSPIインターフェースを備えており、MOSI/MISO/SCKラインはディスプレイと共有しますが、専用のCSピンを必要とします。.
Q: 初心者にとって最適なソフトウェアライブラリは何ですか?
A: もし Arduino互換 ボードを使用している場合は、 Adafruit_GFX. から始めてください。ESP32やSTM32でプロフェッショナルな速度が必要な場合は、 TFT_eSPI または LVGL.
に移行することをお勧めします。
結論:SPIディスプレイはあなたに適していますか? は「ちょうど良い」解決策として台頭しています——速度、複雑さ、コストのバランスが取れているからです。 使用の決定は、プロジェクトの要件のバランスに帰着します。高フレームレート、鮮やかな色彩、そして適度な数のGPIOピンが利用可能な場合、 SPIプロトコル は他に類を見ない性能を発揮します。より単純なインターフェースに比べて 信号品質 そして ロジックレベルシフト により注意を払う必要がありますが、得られる性能向上は疑いようがありません。.
を習得し、適切なドライバ(例: 通常、CPUはピクセルデータのすべてのバイトをSPIバッファに「手渡し」で運ぶ必要があり、これによりCPUの注意力の100%が消費されます。 )を選択することで、単純なマイクロコントローラプロジェクトを高級なグラフィカル体験へと変革できます。 ST7789タッチスクリーン付きTFT LCDモジュール:確かな2026年調達ガイド 3.





